









產品情報 »
產品目錄
» 真空設備(真空發生器/真空吸盤/其他)
» 協作機械手臂用 真空夾取單元
協作機械手臂用 真空夾取單元
Vacuum Gripper for Collaborative Robots ZXP7□11-X1□
for YASKAWA Electric Corporation collaborative robot MOTOMAN-HC10DT

-
・Can be operated simply by connecting 1 compressed air supply tube and the built-in cable for electric wiring
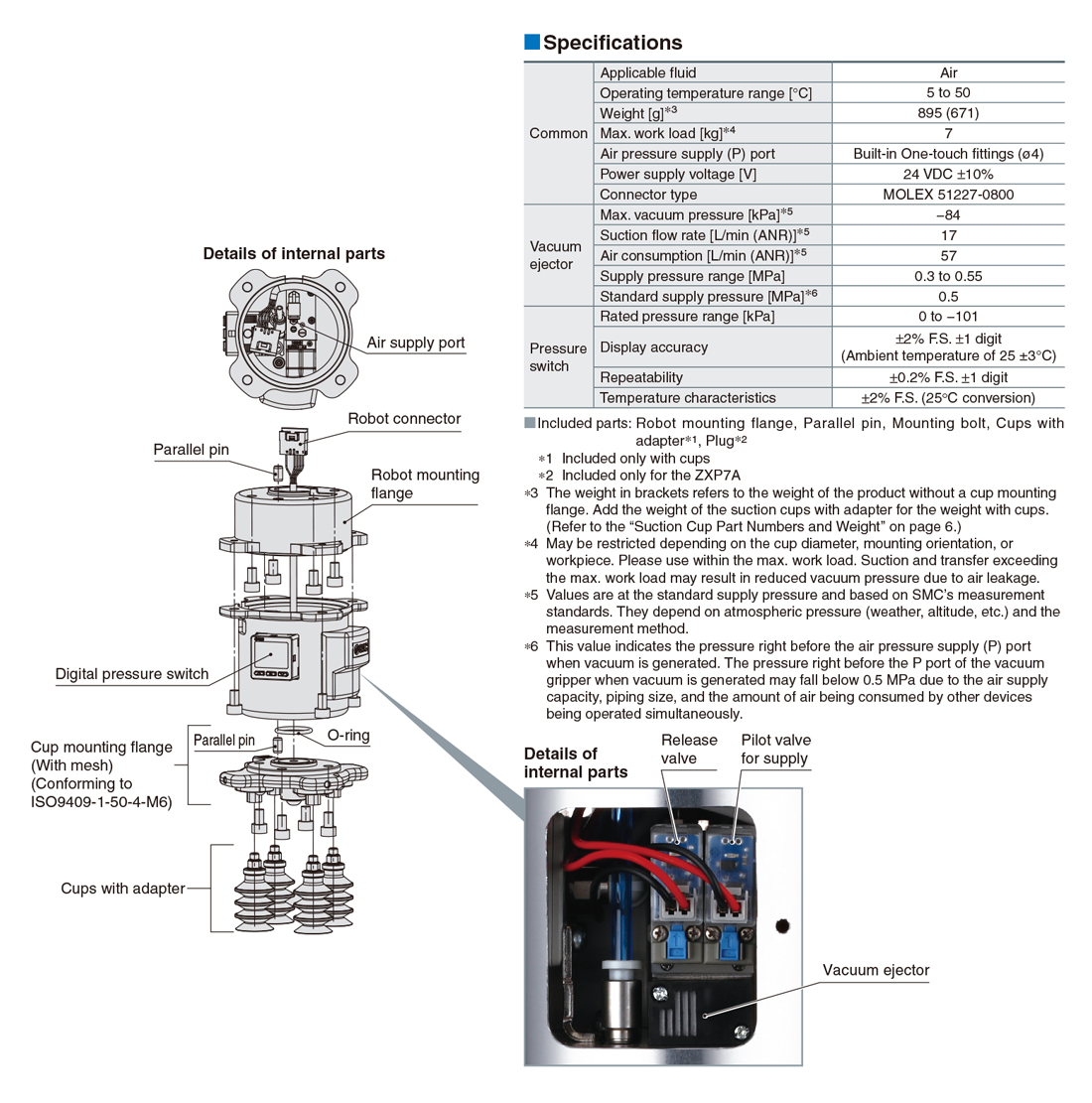
・Integrated vacuum ejector, air supply/release valve, pressure switch, and cups
・As the air piping and electric wiring built into the robot are used, no external wiring or piping is required.
No interference with workpieces or workers
・Features a rounded appearance without corners
・A wide variety of cup variations are available to support a wide range of workpieces.
Safety Instructions Vacuum Equipment/Precautions Series Variations/Model Selection
Green Procurement (RoHS)
Green Procurement (RoHS)
| Series | Cup form | Cup diameter | Suction flow rate [L/min(ANR)] | Air consumption [L/min(ANR)] |
|---|---|---|---|---|
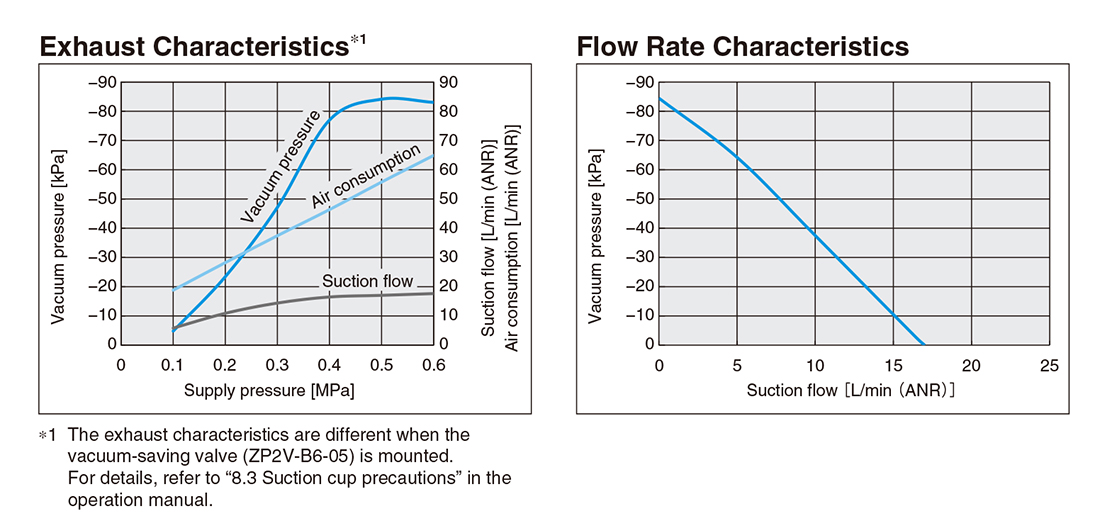
| ZXP7□11-X1□ | Flat Flat with rib Bellows Thin flat Multistage bellows 2.5-stage bellows 5.5-stage bellows | φ8 to φ32 | 17 | 57 |
產品特點
■Vacuum Gripper for Collaborative Robots

■Can be operated simply by connecting 1 compressed air supply tube and the built-in cable for electric wiring
■Integrated vacuum ejector, air supply/release valve, pressure switch, and cups
■As the air piping and electric wiring built into the robot are used, no external wiring or piping is required.
No interference with workpieces or workers
■Features a rounded appearance without corners
■A wide variety of cup variations are available to support a wide range of workpieces.
■Component Parts
■Cup Variations
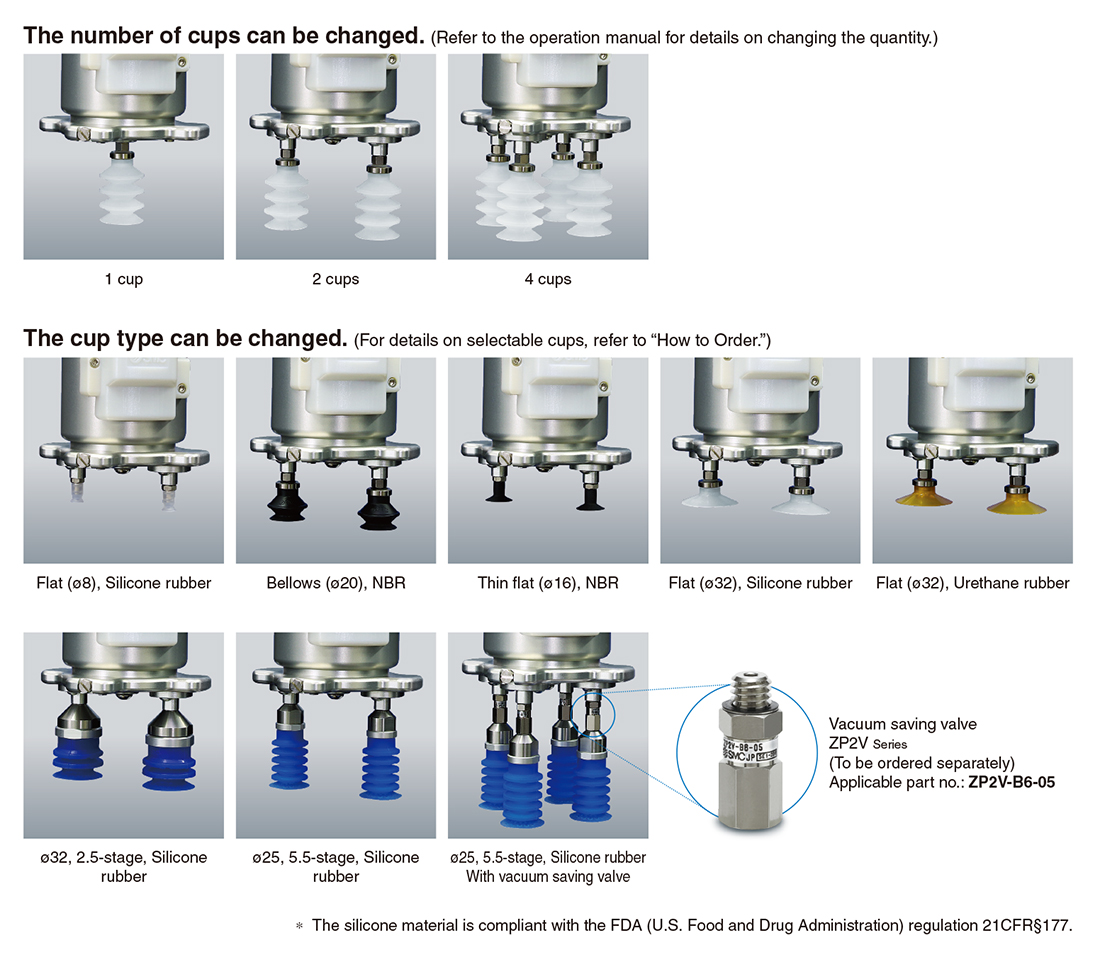
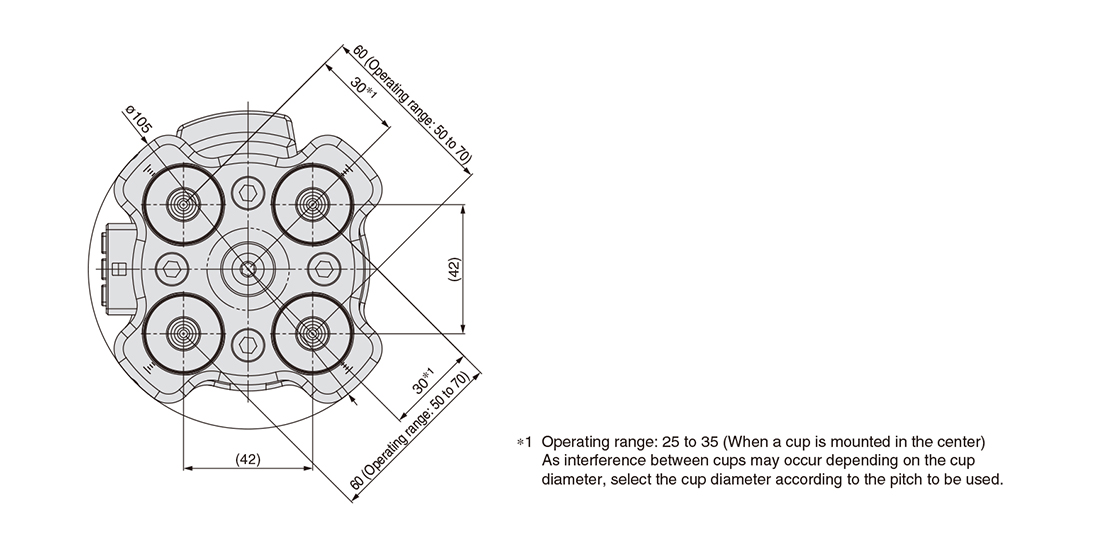
■The cup pitch can be changed.
■Model Selection
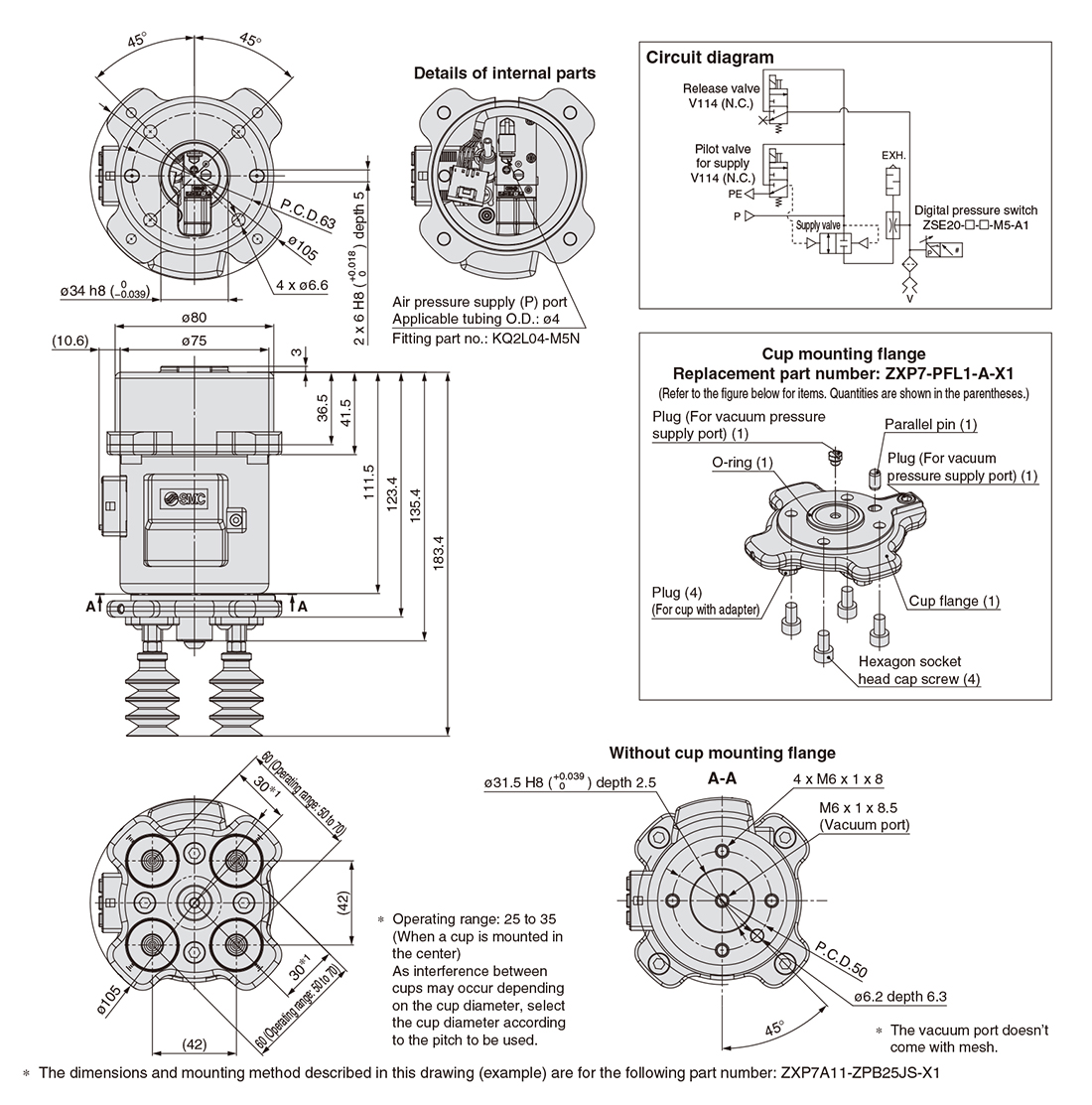
■Dimensions