

-














New Products
Product Information »
New Products



Magnet Gripper
for Collaborative Robots
MHM-X7400A
for UNIVERSAL ROBOTS Updated May-21
for Collaborative Robots
MHM-X7400A
for UNIVERSAL ROBOTS Updated May-21
- Plug and Play configuration for immediate use
- URCap: Easy programming
- Attracts and holds heavy objects with a magnet
- Supports workpieces with holes and uneven surfaces
- Compact with high holding force
Holding force: Max. 200 N (ø25, Workpiece thickness 6 mm) - Continues to hold workpieces even when the air is shut off
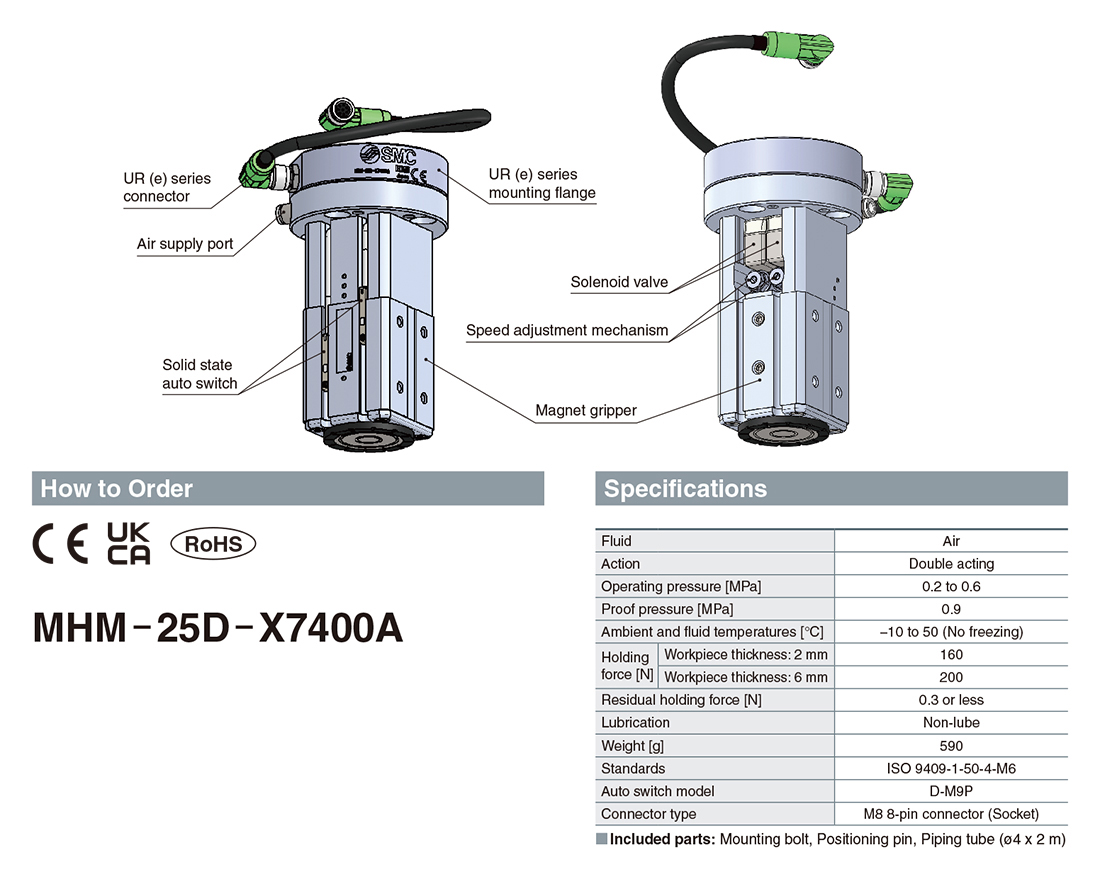
- Operate by simply connecting 1 air supply tube and an electrical wiring M8 connector.
- Integrated solenoid valve, auto switch, and piston speed adjustment mechanism


Product Features
■Magnet Gripper for Collaborative Robots
■Attracts and holds heavy objects with a magnet
■Supports workpieces with holes and uneven surfaces
■Compact with high holding force: Max. 200 N (ø25, Workpiece thickness 6 mm)
■Continues to hold workpieces even when the air is shut off
■Operate by simply connecting 1 air supply tube and an electrical wiring M8 connector.
■Integrated solenoid valve, auto switch, and piston speed adjustment mechanism
■URCap
■Component Parts
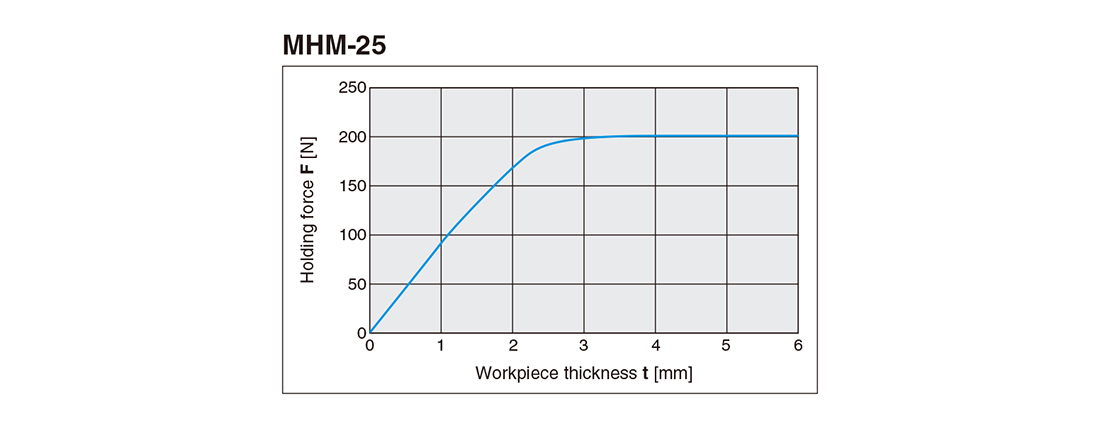
■Characteristics
Holding force
The holding force graph shows the theoretical value for low-carbon steel plates.
Holding forces vary depending on the material and shape of the workpiece. Please perform a holding test while referring to the value selected based on the graph.
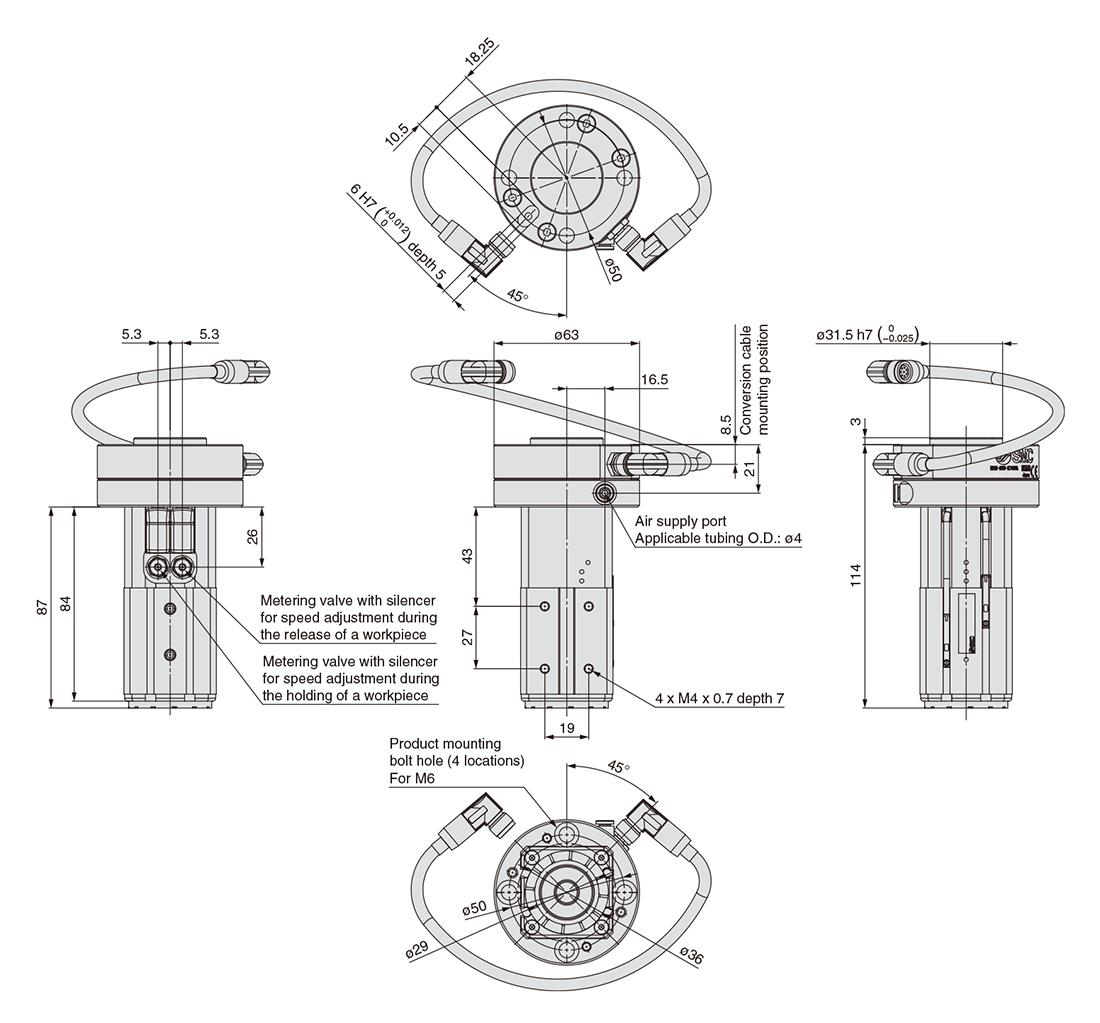
■Dimensions
■ URCap
Easy programming
By using the dedicated software certified for Universal Robots, URCap, the teaching pendant can conduct various operations intuitively, allowing for sensor signals to be easily incorporated.
Save a copy of the URCap software to a USB memory and insert it into the teaching pendant to easily install the software.
∗ Please download the URCap software from the website, and save it to a USB memory.
